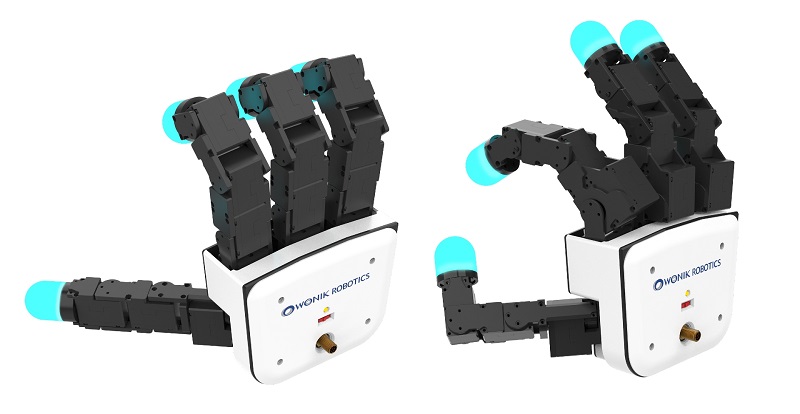
▲ Allegro Hand V5(알레그로 핸드 V5): 왼-Allegro Hand V5(4F). 오-Allegro Hand V5(4F) Plus / 사진제공=원익로보틱
원익로보틱스(대표 김학래)가 자체 개발한 로봇 핸드 ‘Allegro Hand V5(이후 V5)’를 공식 출시한다. V5는 각 손가락 끝에 전방위 촉각센서를 적용해, 물체의 표면과의 접촉이나 파지 시 압력 값을 실시간으로 제공하는 혁신적인 기능을 갖추고 있다. 이를 통해 사용자는 다양한 연구와 응용 분야에서 촉각 데이터를 활용할 수 있어 더욱 정밀한 작업이 가능해진다.
원익로보틱스의 Allegro Hand 시리즈는 10년 이상 꾸준히 개발 및 판매되어 온 로봇 핸드 플랫폼으로, V5는 이전 모델인 Allegro Hand V4(이후 V4)의 업그레이드 버전이다. V4에서 사용자를 고려하여 동일한 개발 환경을 유지하고 사용자 편의성을 크게 향상시킨 다양한 기능을 추가한 것이 특징이다. 특히, V4에서 제기되었던 손가락 마디 간 케이블 노출 문제를 개선하여 내구성을 높여 인간 손의 형태에 더욱 가까운 디자인으로 진화했다.
V5는 16자유도의 다관절 구조를 갖추고 있으며, 각 손가락에 4개의 자유도를 할당해 인간 손의 움직임을 정밀하게 모사할 수 있다. 일반적인 그리퍼와 달리 V5는 파지력을 세밀하게 제어할 수 있어 다양한 형태의 물체를 안전하게 잡을 수 있다. 또한, 기존 모델 대비 3배에 달하는 가반하중을 가지고 있어 더 무겁고 다양한 물체를 다룰 수 있는 응용 범위가 크게 확대되었다.
원익로보틱스의 관계자는 "Allegro Hand V5는 기존 V4 사용자와 신규 고객 모두를 만족시킬 수 있도록 개발된 제품으로, 촉각센서를 통해 산업용, 상업용 그리고 연구용 분야에서 로봇 핸드의 활용도를 한 단계 더 높였다"며 "앞으로도 고도화된 로봇 기술로 글로벌 시장에서 경쟁력을 강화해 나갈 계획"이라고 말했다.
원익로보틱스는 V5의 주요 활용 분야로 휴머노이드 로봇 손, 모바일 매니퓰레이터의 End-effector 그리고 AI 기반의 다양한 연구 영역을 지향하고 있다. 전방위 촉각센서가 탑재된 V5는 인간의 손길을 대체할 수 있는 정교한 로봇 핸드로, 산업 자동화뿐만 아니라 로봇 연구 개발관련 학계 및 연구기관(기업)에 서도 높은 관심을 받을 것으로 기대된다.
한편, 원익로보틱스는 메타(META, 이하 메타)의 AI 연구소인 페어(FAIR)와 협력하여 알레그로 핸드 V4(Allegro Hand V4)를 활용해 촉각 센서가 장착된 알레그로 핸드를 개발 중이다. 이러한 내용은 지난 11월 1일 메타 홈페이지 및 블로그를 통해 공개되었으며, 여기에 메타는 “산업의 선도 기업인 원익로보틱스와 협력하여 촉각 센싱을 개발하고 상용화할 예정”이라며, “원익로보틱스와의 파트너십은 ‘Meta Digit Plexus’를 활용한 촉각 센싱 기술을 완전히 통합하여 새롭고 선진화된 다재다능한 로봇 핸드를 창출할 것으로 기대한다”고 밝힌 바 있다.
김동호 기자